ABOUT
Real Life
When many people first think about a "Cyborg", they recognize it as something out of science fiction. And it is no wonder. If a being who is half-man, half-machine that posesses almost superhuman abilities happens to show up in town one day, it would be almost hard to believe. However with the advances of technology, such a thing is possible. You might be familiar that robotic limbs have been used to replace missing arms and legs. But some can even be worn to amplify the strength of these limbs, resulting in almost superhuman abilities just like those of the sci-fi world. The designs vary depending on the usage. Some respond to pressure, others interact directly with signals given off by nerves or muscles. Some are large, some even seem a little bit over-the-top. And chances are spending a month in the gym to obtain an equal amount of strength would require a lot less time (and money). Nevertheless, these real life models serve as a guide, an example, and an inspiration for our project.
Basic Concept & Our Plan
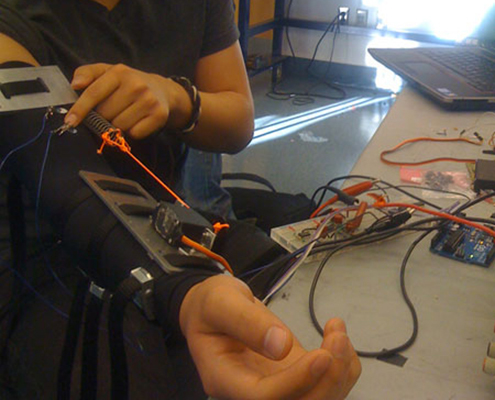
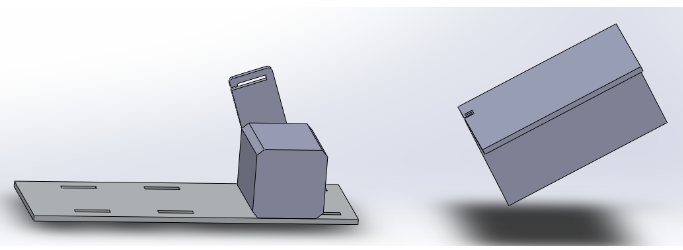
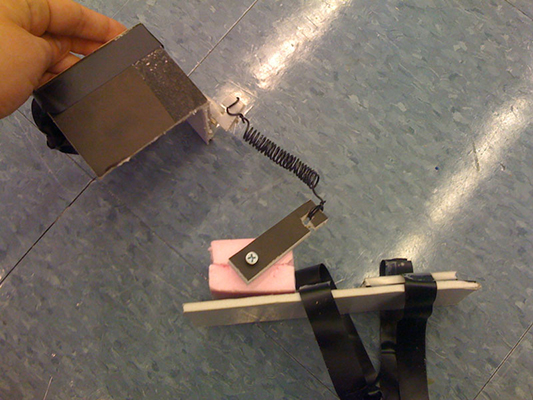
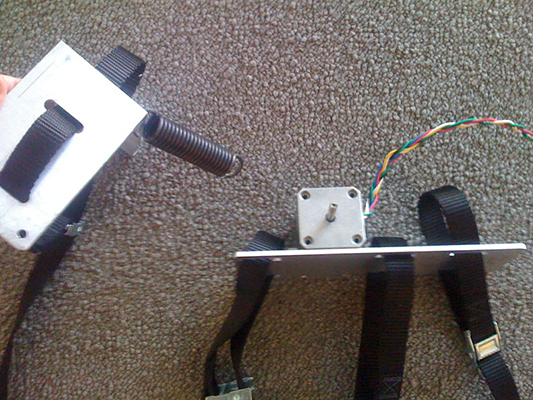
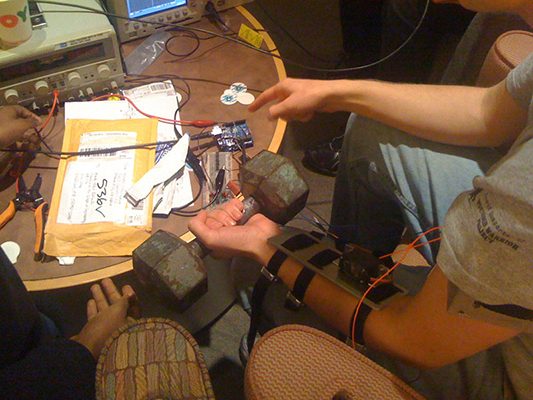
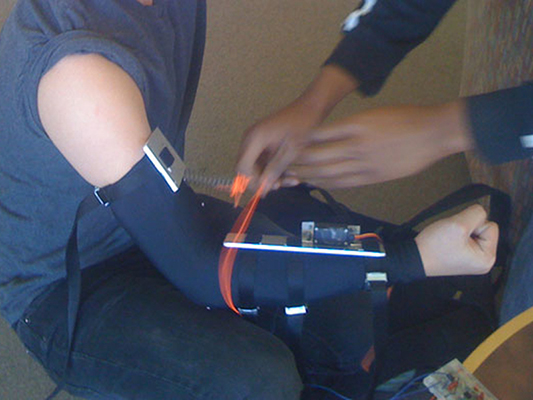
We plan to make an exoskeleton arm that will attach to the user’s existing arm. It will be controlled by the user’s movement through the use of an EMG (Electromyography) and either motors or pistons. It will have the effect of increasing the force output of the user. A design requirement is that is must be portable and it must be safe. Our final goal is to have multiple degrees of freedom in our arm.
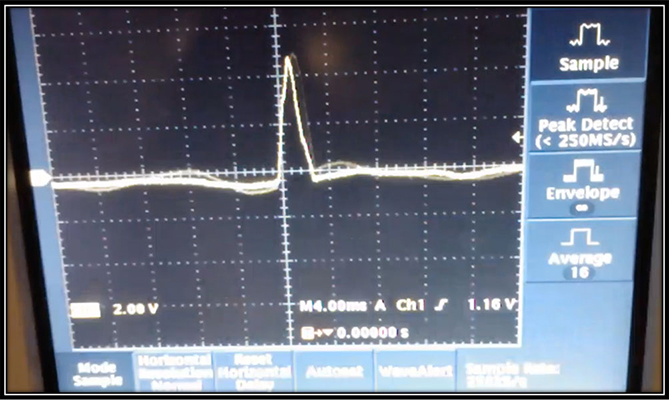
We will begin by creating a working EMG and the mechanical system separately. These components will be combined to create a functioning system. The EMG reads the muscle movement which is passed through code and outputted to the motor. The motor then acts on what it is told.
Project Description and Statement of Work
We will begin by creating a working EMG and the mechanical system separately. These components will be combined to create a functioning system. The EMG reads the muscle movement which is passed through code and output to the motor. The motor then acts on what it is told. The major components are the EMG, the operation of the motor/pneumatics/gears and the system that interacts with the arm. The system must include safety features that help protect the user’s arm and hopefully include comfort features to reduce any skin irritation from the cyborg arm. Our project is unique from other existing cyborg arms in that a cheaper/lower budget than what is usually available.
Team Members
- **All Team Members do what is needed as needed, however below are our particular specialties**
- Kai Austin: Coding, Website, Design
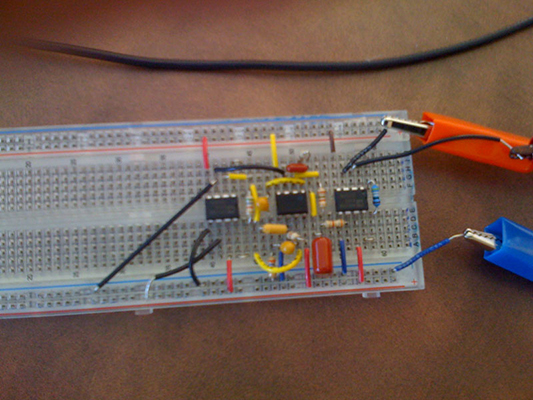
- Mark Giolando: Circuits, EMG
- Chris Lee: Coding, Documentation
- Ndungu Muturi: Mechanical
Team Member Responsibilities
Depending on what the responsibilities are for each member, the team can be split into sub-teams that work together on the two separate parts of the system: the EMG, and the Mechanical. We can have entire team meetings on Mondays/Thursdays to consolidate our progress among different sub teams and try to integrate what we have accomplished. This also works to insure people do not fall behind and that everyone is on same page about the project.
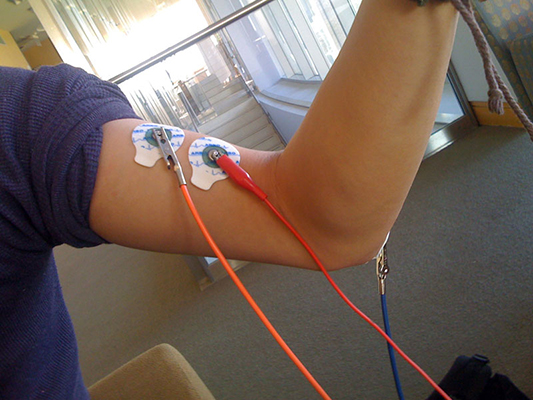
The EMG team is responsible for getting the EMG to accurately match the motion of the arm. They will be in charge of making code that runs the output of the EMG into the input for the mechanical system.
The mechanical systems team is responsible for creating the support structure and preparing the motor/pneumatics/gears to run on what the EMG/software puts out. The mechanical team is also responsible for documenting our project as well as providing necessary information on the progress in the website.
Both teams are responsible for including safeties such as not having feedback loops for the EMG team and not extending the arm past the breaking point on either side of the arm’s natural range of motion for the mechanical team. The EMG team would also build in a physical kill switch and a blinking light so to indicate when the system is active.